Resnet for Image Classification
Resnet Introduction
Resnet swept multiple computer vision contests such as Imagenet and Coco with SOTA(State of the art) performance in 2015.
Simonyan et al. authors of VGG demonstrated that by simply stacking more layers, we can improve accuracy. This is true up to a point. Very Deep networks are hard to train because of the notorious vanishing gradient problem. As the gradient is back-propagated to earlier layers, repeated multiplication may make the gradient infinitively small. As a result, as the network goes deeper, its performance gets saturated or even starts degrading rapidly. ResNet showed that it possible to train up to hundreds or even thousands of layers and still improve accuracy.
The key idea driving the design of ResNet is actually best described in the original paper itself: “So rather than expect stacked layers approximate H(x) (the underlying mapping function), we explicitly let these layers approximate a residual function F(x) := H(x) -x. The original function thus becomes F(x) + x. ”
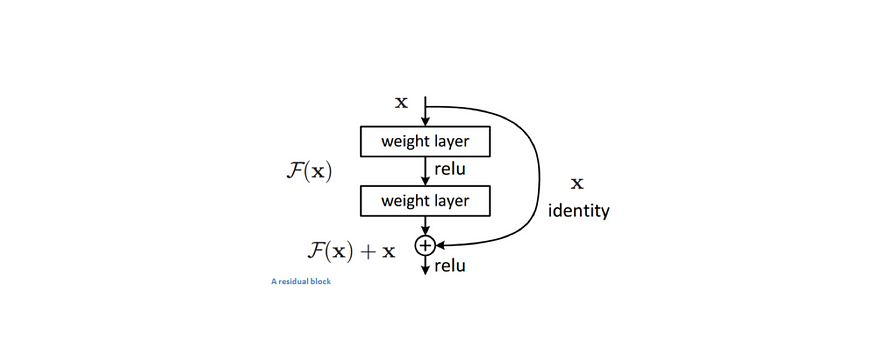
Given an x, the goal is to find an underlying mapping function H(x). He et al proposed to approximate another simple, function F(x), such that
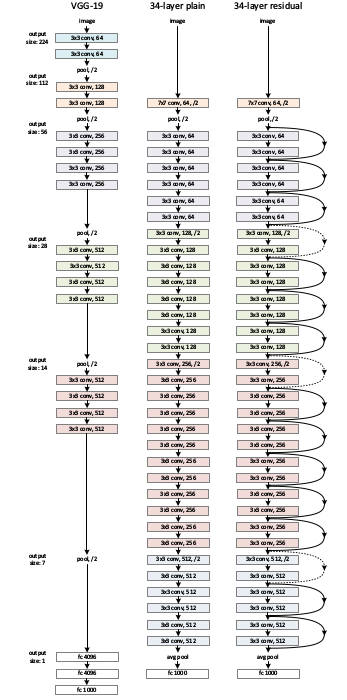
This not only allows better gradient flow allowing us to go deeper but also ensures faster convergence of weights. The authors showed comparisons with VGG net, a 34 layer net without residual connections and 34 layer net with residual connections. The validation was done in the imagenet data.

We are going to implement a resent from scratch for practice and use the pre trained version of Resnet to classification of fruits from the following Kaggle dataset - the Fruits 360 dataset A dataset with 65429 images of 95 fruits(https://www.kaggle.com/moltean/fruits)


# References:
[1]. A. Krizhevsky, I. Sutskever, and G. E. Hinton. Imagenet classification with deep convolutional neural networks. In Advances in neural information processing systems,pages1097–1105,2012.
[2]. K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning for image recognition. arXiv preprint arXiv:1512.03385,2015.
[3]. K. Simonyan and A. Zisserman. Very deep convolutional networks for large-scale image recognition. arXiv preprint arXiv:1409.1556,2014.
[4]. C. Szegedy, W. Liu, Y. Jia, P. Sermanet, S. Reed, D. Anguelov, D. Erhan, V. Vanhoucke, and A. Rabinovich. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition,pages 1–9,2015.
[5]. K. He, X. Zhang, S. Ren, and J. Sun. Identity Mappings in Deep Residual Networks. arXiv preprint arXiv:1603.05027v3,2016.
from __future__ import print_function, division
from builtins import range, input
# Let's go up to the end of the first conv block
# to make sure everything has been loaded correctly
# compared to keras
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import keras
from keras.applications.resnet50 import ResNet50
from keras.models import Model
from keras.preprocessing import image
from keras.layers import Dense
from keras.applications.resnet50 import preprocess_input, decode_predictions
from tf_resnet_convblock import ConvLayer, BatchNormLayer, ConvBlock
from tf_resnet_identity_block import IdentityBlock
from tf_resnet_first_layers import ReLULayer, MaxPoolLayer
# ConvBlock
# IdentityBlock x 2
#
# ConvBlock
# IdentityBlock x 3
#
# ConvBlock
# IdentityBlock x 5
#
# ConvBlock
# IdentityBlock x 2
#
# AveragePooling2D
# Flatten
# Dense (Softmax)
# ]
# define some additional layers so they have a forward function
class AvgPool:
def __init__(self, ksize):
self.ksize = ksize
def forward(self, X):
return tf.nn.avg_pool(
X,
ksize=[1, self.ksize, self.ksize, 1],
strides=[1, 1, 1, 1],
padding='VALID'
)
def get_params(self):
return []
class Flatten:
def forward(self, X):
return tf.contrib.layers.flatten(X)
def get_params(self):
return []
def custom_softmax(x):
m = tf.reduce_max(x, 1)
x = x - m
e = tf.exp(x)
return e / tf.reduce_sum(e, -1)
class DenseLayer:
def __init__(self, mi, mo):
self.W = tf.Variable((np.random.randn(mi, mo) * np.sqrt(2.0 / mi)).astype(np.float32))
self.b = tf.Variable(np.zeros(mo, dtype=np.float32))
def forward(self, X):
return tf.matmul(X, self.W) + self.b
def copyFromKerasLayers(self, layer):
W, b = layer.get_weights()
op1 = self.W.assign(W)
op2 = self.b.assign(b)
self.session.run((op1, op2))
def get_params(self):
return [self.W, self.b]
class TFResNet:
def __init__(self):
self.layers = [
# before conv block
ConvLayer(d=7, mi=3, mo=64, stride=2, padding='SAME'),
BatchNormLayer(64),
ReLULayer(),
MaxPoolLayer(dim=3),
# conv block
ConvBlock(mi=64, fm_sizes=[64, 64, 256], stride=1),
# identity block x 2
IdentityBlock(mi=256, fm_sizes=[64, 64, 256]),
IdentityBlock(mi=256, fm_sizes=[64, 64, 256]),
# conv block
ConvBlock(mi=256, fm_sizes=[128, 128, 512], stride=2),
# identity block x 3
IdentityBlock(mi=512, fm_sizes=[128, 128, 512]),
IdentityBlock(mi=512, fm_sizes=[128, 128, 512]),
IdentityBlock(mi=512, fm_sizes=[128, 128, 512]),
# conv block
ConvBlock(mi=512, fm_sizes=[256, 256, 1024], stride=2),
# identity block x 5
IdentityBlock(mi=1024, fm_sizes=[256, 256, 1024]),
IdentityBlock(mi=1024, fm_sizes=[256, 256, 1024]),
IdentityBlock(mi=1024, fm_sizes=[256, 256, 1024]),
IdentityBlock(mi=1024, fm_sizes=[256, 256, 1024]),
IdentityBlock(mi=1024, fm_sizes=[256, 256, 1024]),
# conv block
ConvBlock(mi=1024, fm_sizes=[512, 512, 2048], stride=2),
# identity block x 2
IdentityBlock(mi=2048, fm_sizes=[512, 512, 2048]),
IdentityBlock(mi=2048, fm_sizes=[512, 512, 2048]),
# pool / flatten / dense
AvgPool(ksize=7),
Flatten(),
DenseLayer(mi=2048, mo=1000)
]
self.input_ = tf.placeholder(tf.float32, shape=(None, 224, 224, 3))
self.output = self.forward(self.input_)
def copyFromKerasLayers(self, layers):
# conv
self.layers[0].copyFromKerasLayers(layers[1])
# bn
self.layers[1].copyFromKerasLayers(layers[2])
# cb
self.layers[4].copyFromKerasLayers(layers[5:17]) # size=12
# ib x 2
self.layers[5].copyFromKerasLayers(layers[17:27]) # size=10
self.layers[6].copyFromKerasLayers(layers[27:37])
# cb
self.layers[7].copyFromKerasLayers(layers[37:49])
# ib x 3
self.layers[8].copyFromKerasLayers(layers[49:59])
self.layers[9].copyFromKerasLayers(layers[59:69])
self.layers[10].copyFromKerasLayers(layers[69:79])
# cb
self.layers[11].copyFromKerasLayers(layers[79:91])
# ib x 5
self.layers[12].copyFromKerasLayers(layers[91:101])
self.layers[13].copyFromKerasLayers(layers[101:111])
self.layers[14].copyFromKerasLayers(layers[111:121])
self.layers[15].copyFromKerasLayers(layers[121:131])
self.layers[16].copyFromKerasLayers(layers[131:141])
# cb
self.layers[17].copyFromKerasLayers(layers[141:153])
# ib x 2
self.layers[18].copyFromKerasLayers(layers[153:163])
self.layers[19].copyFromKerasLayers(layers[163:173])
# dense
self.layers[22].copyFromKerasLayers(layers[175])
def forward(self, X):
for layer in self.layers:
X = layer.forward(X)
return X
def predict(self, X):
assert(self.session is not None)
return self.session.run(
self.output,
feed_dict={self.input_: X}
)
def set_session(self, session):
self.session = session
for layer in self.layers:
if isinstance(layer, ConvBlock) or isinstance(layer, IdentityBlock):
layer.set_session(session)
else:
layer.session = session
def get_params(self):
params = []
for layer in self.layers:
params += layer.get_params()
if __name__ == '__main__':
# you can also set weights to None, it doesn't matter
resnet_ = ResNet50(weights='imagenet')
# make a new resnet without the softmax
x = resnet_.layers[-2].output
W, b = resnet_.layers[-1].get_weights()
y = Dense(1000)(x)
resnet = Model(resnet_.input, y)
resnet.layers[-1].set_weights([W, b])
# you can determine the correct layer
# by looking at resnet.layers in the console
partial_model = Model(
inputs=resnet.input,
outputs=resnet.layers[175].output
)
# maybe useful when building your model
# to look at the layers you're trying to copy
print(partial_model.summary())
# create an instance of our own model
my_partial_resnet = TFResNet()
# make a fake image
X = np.random.random((1, 224, 224, 3))
# get keras output
keras_output = partial_model.predict(X)
### get my model output ###
# init only the variables in our net
init = tf.variables_initializer(my_partial_resnet.get_params())
# note: starting a new session messes up the Keras model
session = keras.backend.get_session()
my_partial_resnet.set_session(session)
session.run(init)
# first, just make sure we can get any output
first_output = my_partial_resnet.predict(X)
print("first_output.shape:", first_output.shape)
# copy params from Keras model
my_partial_resnet.copyFromKerasLayers(partial_model.layers)
# compare the 2 models
output = my_partial_resnet.predict(X)
diff = np.abs(output - keras_output).sum()
if diff < 1e-10:
print("Everything's great!")
else:
print("diff = %s" % diff)
from __future__ import print_function, division
from builtins import range, input
# Note: you may need to update your version of future
# sudo pip install -U future
from keras.layers import Input, Lambda, Dense, Flatten
from keras.models import Model
from keras.applications.resnet50 import ResNet50, preprocess_input
# from keras.applications.inception_v3 import InceptionV3, preprocess_input
from keras.preprocessing import image
from keras.preprocessing.image import ImageDataGenerator
from sklearn.metrics import confusion_matrix
import numpy as np
import matplotlib.pyplot as plt
from glob import glob
# re-size all the images to this
IMAGE_SIZE = [224, 224] # feel free to change depending on dataset
# training config:
epochs = 16
batch_size = 32
# https://www.kaggle.com/paultimothymooney/blood-cells
train_path = '../large_files/blood_cell_images/TRAIN'
valid_path = '../large_files/blood_cell_images/TEST'
# https://www.kaggle.com/moltean/fruits
# train_path = '../large_files/fruits-360/Training'
# valid_path = '../large_files/fruits-360/Validation'
# train_path = '../large_files/fruits-360-small/Training'
# valid_path = '../large_files/fruits-360-small/Validation'
# useful for getting number of files
image_files = glob(train_path + '/*/*.jp*g')
valid_image_files = glob(valid_path + '/*/*.jp*g')
# useful for getting number of classes
folders = glob(train_path + '/*')
# look at an image for fun
plt.imshow(image.load_img(np.random.choice(image_files)))
plt.show()
# add preprocessing layer to the front of VGG
res = ResNet50(input_shape=IMAGE_SIZE + [3], weights='imagenet', include_top=False)
# don't train existing weights
for layer in res.layers:
layer.trainable = False
# our layers - you can add more if you want
x = Flatten()(res.output)
# x = Dense(1000, activation='relu')(x)
prediction = Dense(len(folders), activation='softmax')(x)
# create a model object
model = Model(inputs=res.input, outputs=prediction)
# view the structure of the model
model.summary()
# tell the model what cost and optimization method to use
model.compile(
loss='categorical_crossentropy',
optimizer='rmsprop',
metrics=['accuracy']
)
# create an instance of ImageDataGenerator
gen = ImageDataGenerator(
rotation_range=20,
width_shift_range=0.1,
height_shift_range=0.1,
shear_range=0.1,
zoom_range=0.2,
horizontal_flip=True,
vertical_flip=True,
preprocessing_function=preprocess_input
)
# test generator to see how it works and some other useful things
# get label mapping for confusion matrix plot later
test_gen = gen.flow_from_directory(valid_path, target_size=IMAGE_SIZE)
print(test_gen.class_indices)
labels = [None] * len(test_gen.class_indices)
for k, v in test_gen.class_indices.items():
labels[v] = k
# should be a strangely colored image (due to VGG weights being BGR)
for x, y in test_gen:
print("min:", x[0].min(), "max:", x[0].max())
plt.title(labels[np.argmax(y[0])])
plt.imshow(x[0])
plt.show()
break
# create generators
train_generator = gen.flow_from_directory(
train_path,
target_size=IMAGE_SIZE,
shuffle=True,
batch_size=batch_size,
)
valid_generator = gen.flow_from_directory(
valid_path,
target_size=IMAGE_SIZE,
shuffle=True,
batch_size=batch_size,
)
# fit the model
r = model.fit_generator(
train_generator,
validation_data=valid_generator,
epochs=epochs,
steps_per_epoch=len(image_files) // batch_size,
validation_steps=len(valid_image_files) // batch_size,
)
def get_confusion_matrix(data_path, N):
# we need to see the data in the same order
# for both predictions and targets
print("Generating confusion matrix", N)
predictions = []
targets = []
i = 0
for x, y in gen.flow_from_directory(data_path, target_size=IMAGE_SIZE, shuffle=False, batch_size=batch_size * 2):
i += 1
if i % 50 == 0:
print(i)
p = model.predict(x)
p = np.argmax(p, axis=1)
y = np.argmax(y, axis=1)
predictions = np.concatenate((predictions, p))
targets = np.concatenate((targets, y))
if len(targets) >= N:
break
cm = confusion_matrix(targets, predictions)
return cm
cm = get_confusion_matrix(train_path, len(image_files))
print(cm)
valid_cm = get_confusion_matrix(valid_path, len(valid_image_files))
print(valid_cm)
# plot some data
# loss
plt.plot(r.history['loss'], label='train loss')
plt.plot(r.history['val_loss'], label='val loss')
plt.legend()
plt.show()
# accuracies
plt.plot(r.history['acc'], label='train acc')
plt.plot(r.history['val_acc'], label='val acc')
plt.legend()
plt.show()
from util import plot_confusion_matrix
plot_confusion_matrix(cm, labels, title='Train confusion matrix')
plot_confusion_matrix(valid_cm, labels, title='Validation confusion matrix')